- UAVCAN枚举与配置
UAVCAN枚举与配置
官网英文原文地址:http://dev.px4.io/uavcan-node-enumeration.html
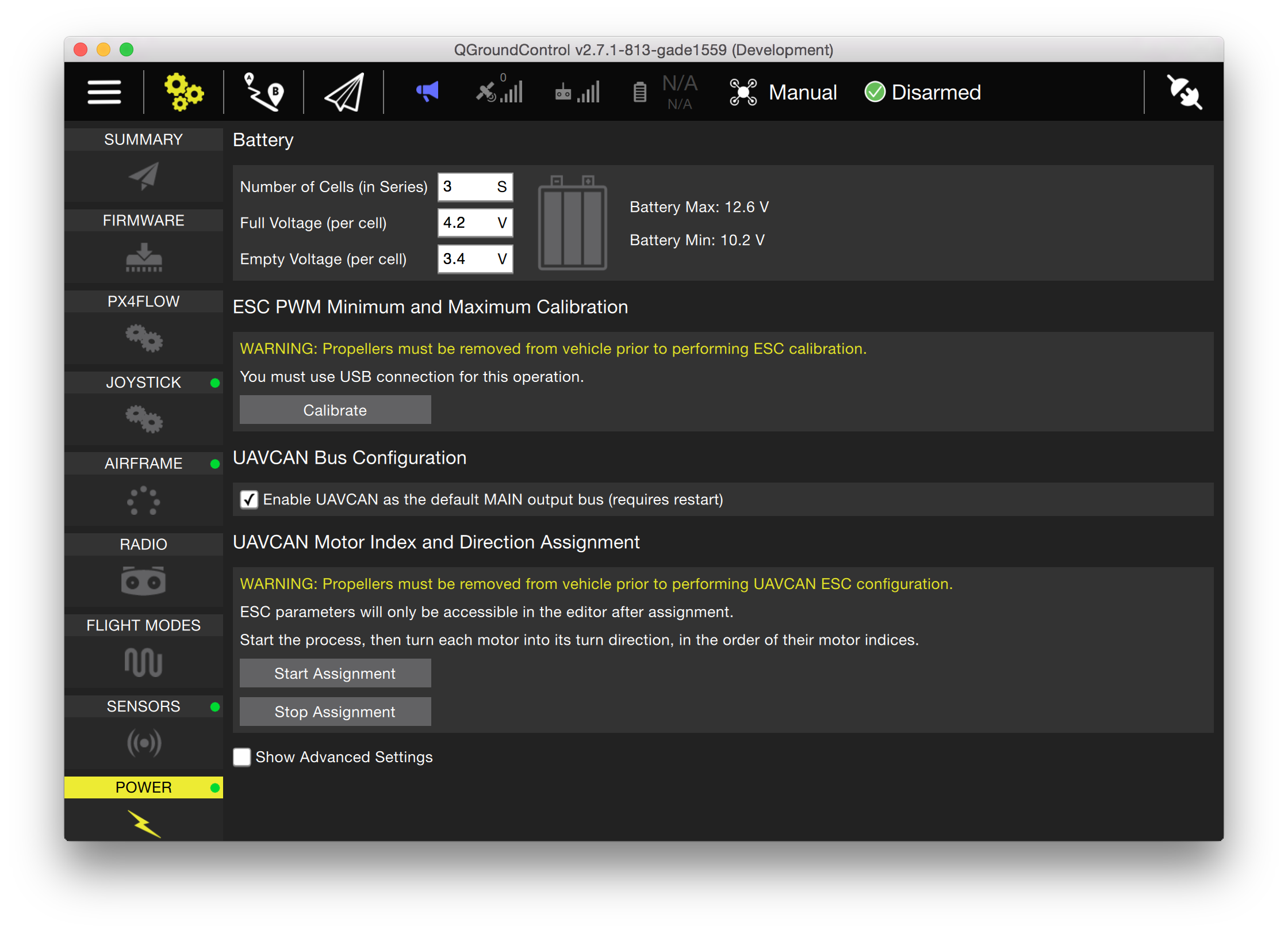
提示: 如下图所示通过勾选
Enable UAVCAN复选框,将UAVCAN作为默认电机输出总线。或者可以在QGroundControl参数编辑器中将UAVCAN_ENABLE参数设置为3。 若将其设置为2虽然能启用CAN,但电机输出仍为PWM。
使用 QGroundControl并切换到设置界面,选择左侧的电源配置,点击开始分配(start assignment)按钮。
第一次发出哔声后,将第一个ESC上的电机桨叶快速朝正确方向转动。 每次编号完成后,ESC都将发出蜂鸣声。对所有电机控制器按电机映射图上显示的顺序重复此步骤。此步骤只能执行一次,不需要在固件升级后重复。