- Intel Aero
- Introduction
- Flashing
- Connecting QGroundControl via Network
Intel Aero
官网英文原文地址:http://dev.px4.io/hardware-intel-aero.html
The Aero is a UAV development platform. Part of this is the Intel Aero Compute Board (see below), running Linux on a Quad-core CPU. This is connected to the FMU, which runs PX4 on NuttX.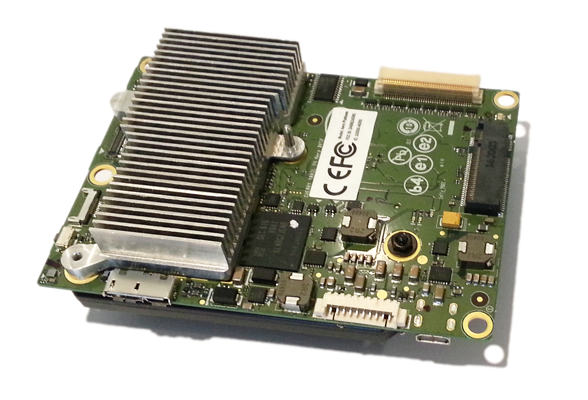
Introduction
The main documentation is under https://github.com/intel-aero/meta-intel-aero/wiki. It includes instructions how to setup, update and connect to the board. And it also explains how to do development on the Linux side.
The following describes how to flash and connect to the FMU.
Flashing
After setting up the PX4 development environment, follow these steps to put the PX4 software on the FMU board:
Do a full update of all software on the Aero (https://github.com/intel-aero/meta-intel-aero/wiki/Upgrade-To-Latest-Software-Release)
Grab the Firmware
Compile with
make aerofc-v1_defaultSet the hostname (The following IP assumes you are connected via WiFi):
export AERO_HOSTNAME=192.168.1.1`
- Upload with
make aerofc-v1_default upload
Connecting QGroundControl via Network
Make sure you are connected to the board with WiFi or USB Network
ssh to the board and make sure mavlink forwarding runs. By default it automatically starts when booting. It can be started manually with:
/etc/init.d/mavlink_bridge.sh start
Start QGroundControl and it should automatically connect.
Instead of starting QGroundControl, you can open a NuttX shell with:
./Tools/mavlink_shell.py 0.0.0.0:14550
