- —-
- 参与维护
- 注意看这里
- 参考资料
- 下表是本次汉化工作的贡献者章节分配,欢迎踊跃报名
PX4中文维基
PX4中文维基现已与PX4开发者官网dev.px4.io合并
今后的中文维护将只会在官网进行,望各位继续支持,为汉化多多提出宝贵意见
PX4中文维基由PX4开发者兼爱好者志愿翻译。
欢迎使用评论系统以及在线编辑功能。
欢迎交流,共同进步。
—-
- GitBook
与官网的方式相同,我们也是将网站以GitBook的方式呈现给大家。
Gitbook是一个命令行工具,可以把你的Markdown文件汇集成电子书,并提供PDF等多种格式输出。你可以把Gitbook生成的HTML发布出来,就形成了一个简单的静态网站,就像现在你所看到的。
用CSDN博客的相信大家都不会陌生Markdown这个工具。
不多说,点进来你就知道怎么使用了。
- Github
这里我已经将GitBook托管到了Github上,大家感兴趣的可以fork下来一起完成这项工程谈不上浩大的工作,我想你也常常为打开官网望去满眼的英文而苦恼吧,来吧,我们可以做点什么的。fork地址在这里.
- Git
Git这个工具非常重要,且简单易学有意思,不妨掌握一下,技多不压身。关于Git的学习点我们的擎天柱luoshi006,还有不得不说廖雪峰的官方网站也是极好的,无意间发现Git Community Book中文版,循序渐进吧。
最后还是诚邀志同道合的同志加入PX4中文维基的汉化组。
联系方式: QQ群: 499861916
From Fantasy
参与维护
网页端编辑(强烈推荐:非常简单,只需三步就可以完成你的贡献)
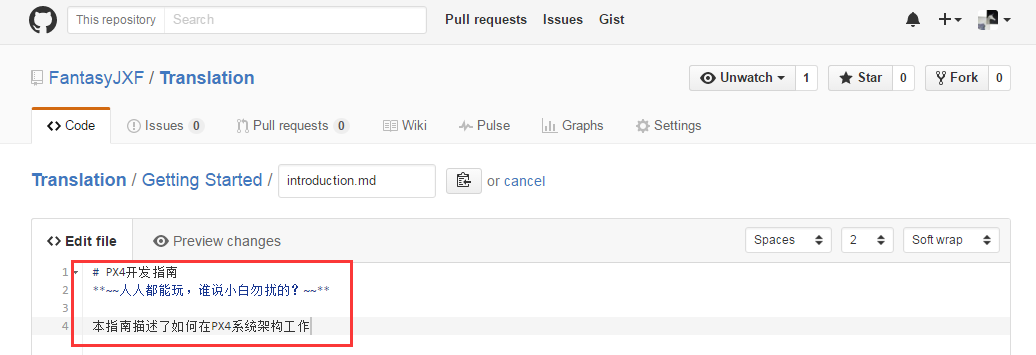
在浏览在线页面时进行编辑本页,这样,只要你看到不妥的地方立马可以修改,具体如下图

或者也可以直接打开github中网页端进入要进行编辑的文件,如下图

- 开始编辑:进入编辑页面后,对文件进行修改,会出现如下图问题

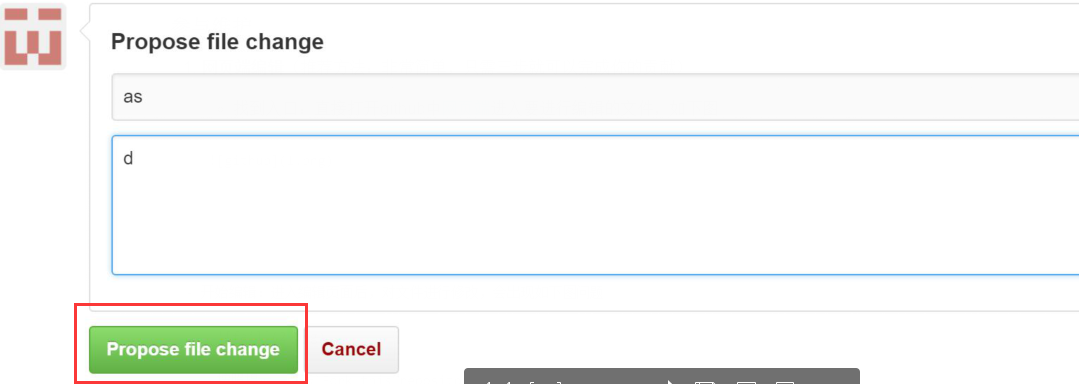
- 按照提示,点击`Fork this repository and propose chanes`,进入即可编辑,如下图
- 提交贡献:首先提名文件更改,如下图
- 检查是否与原有版本有冲突,如果有,解决冲突再提交,没有则提交,如下图
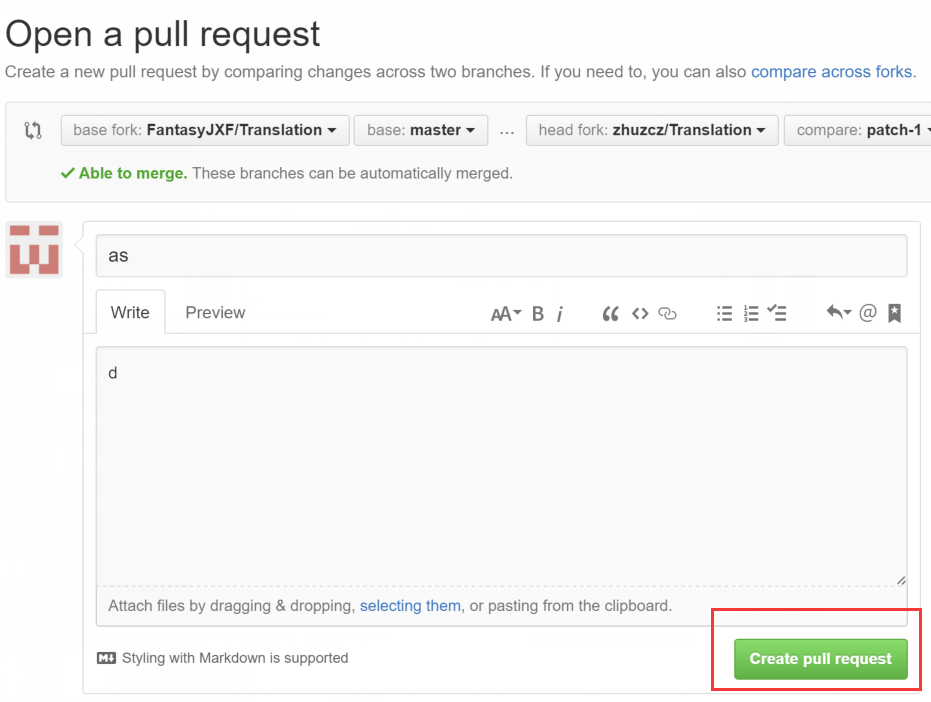
- 剩下来就是版主的事了,如果没有太大的问题,版主就可以合并分支了,到这你的对本文档的贡献就完成了。
本地编辑(git高级用户推荐)
相对于网页端编辑,本地编辑只是编辑在本地,后期的提交分支还是得在网页端进行,不过在此之前你得fork本项目到你的仓库。

然后进行如下操作
#下载你的项目到本地git clone https://github.com/FantasyJXF/Translation.git#进入文件夹进行编辑即可,完成后如下操作git add .#这里可以看到你的更改状况git status#添加你的更改备注,让别人知道你干了什么git commit -m "your comment"#提交更改git pull https://github.com/FantasyJXF/Translation.git master#检查是否与Fantasy云端产生冲突,如果有,解决冲突后重新git commit -m "your comment"git push origin master#推送到个人云端
到这里为止,还只对你自己的仓库进行了修改,你需要
new pull request提交分支到FantasyJXF的仓库,如下图,可以看出,如果只是少量的更改,建议使用网页端编辑。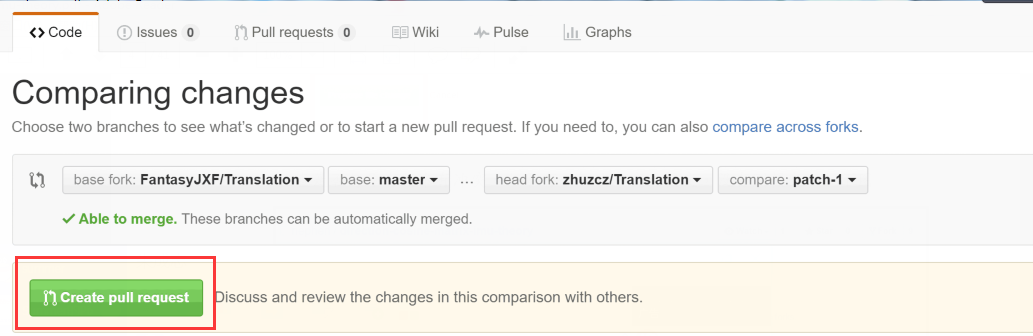
注意看这里
为了方便大家能够更好的参与进维护工作,现做了一些准备工作。分类。文件对应到各自的文件夹。图片集中存放。
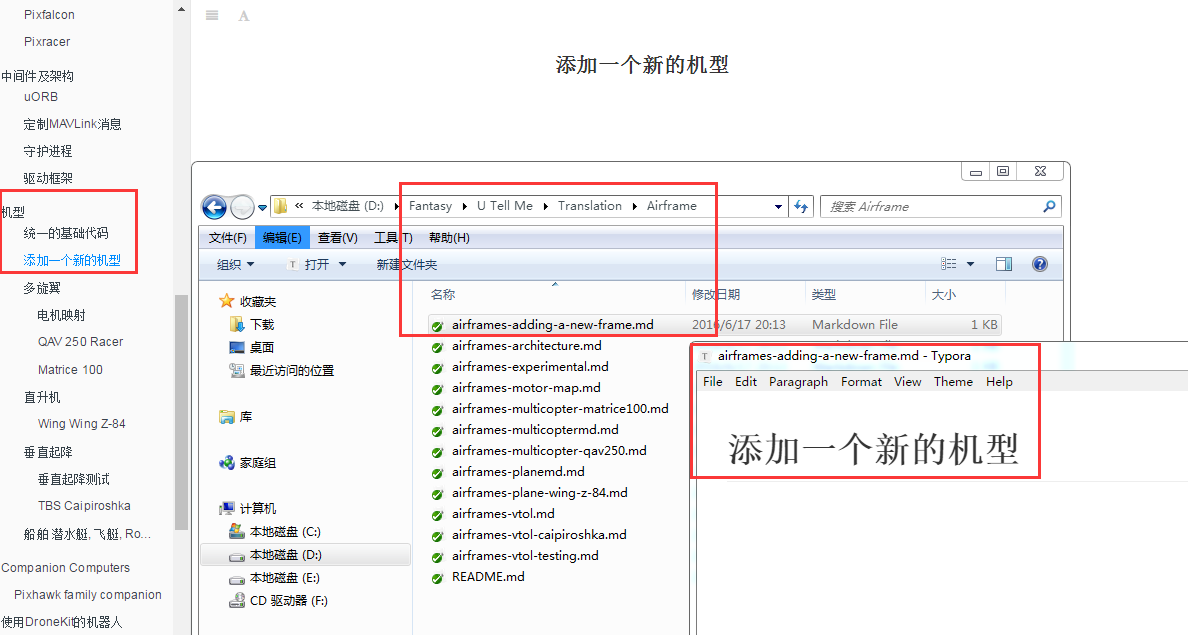
格式。当大家打开需要翻译的文件的时候,格式已经与官网一致了!关于图片、视频、.md文件的链接、引用的超链接以及代码段已经设置完毕了,大家不用再去修改。只需要将相应部分的原文进行替换即可,保证大家到手即翻,什么基础都不需要就能够轻松完成贡献。
不足之处。不愿意将就,源于官网,异于官网。内容虽说大致与官网上一致,但是鉴于官网的更新难以捉摸,目前本网站的版本与官网还存在小不同,但是不影响。本网站上的视频都是Youtube上的,翻墙就能看到。关于翻墙工具,推荐Chrome浏览器 + 氪星人插件
参考资料
关于gitbook,可查看www.gitbook.com。
gitbook的官方使用,可查看https://help.gitbook.com。
这是一个令人感动的GitBook教程http://gitbook.zhangjikai.com/index.html
在此感谢大家辛勤的劳动!
下表是本次汉化工作的贡献者章节分配,欢迎踊跃报名
标题大家有好的意见可以在线改
| Chapter | Contributor | memo |
|---|---|---|
| 1-项目介绍 | 冰 | Introduction |
| 2-新手上路 | - _ - | Getting Started |
| 2.1-初始设置 | 冰 | |
| 2.2-安装工具链 | 冰 | |
| 2.2.1-MAC OS | nxajh | |
| 2.2.2-Linux | 冰 | |
| 2.2.2.1-高级Linux | Innoecho | |
| 2.2.3-Windows | 风城少主 | |
| 2.3-代码编译 | KONG | |
| 2.4-合作开发 | 冰 | |
| 3-概念解读 | - _ - | Concepts |
| 3.1-飞行模式/操作 | Fantasy | |
| 3.2-结构框架 | 风城少主 | |
| 3.3-飞行控制栈 | Fantasy | |
| 3.4-中间件 | 猰貐·信 | |
| 3.5-混控输出 | Innoecho | |
| 3.6-PWM限制状态机 | Innoecho | |
| 4-教程 | Tutorials | |
| 4.1-地面站 | 范新强 | |
| 4.2-编写应用程序 | PONY | |
| 4.3-QGC的视频流 | 积土为山 | |
| 4.4-远距离视频流 | ||
| 4.5-光流 | PONY | |
| 4.6-综合测试 | Innoecho | |
| 4.7-多旋翼PID调参 | Fantasy | |
| 4.8-sdlog2 | Fantasy | |
| 4.9-ecl EKF | Fantasy | |
| 4.10-飞行前检查 | ||
| 4.11-数传 | ||
| 4.12-传感器热补偿 | ||
| 4.13-着陆检测 | 冷酷到底 | |
| 5-仿真 | - _ - | Simulation |
| 5.1-基本仿真 | 积土为山 | |
| 5.2-Gazebo仿真 | 积土为山 | |
| 5.3-硬件在环仿真 | Innoecho | |
| 5.4-连接ROS | Innoecho | |
| 5.4-AirSim仿真 | Fantasy | |
| 6-自驾仪的硬件 | - _ - | Autopilot Hardware |
| 6.1-Crazyfile 2.0 | Fantasy | |
| 6.2-Intel Aero | ||
| 6.3-Pixfacon | 景略 | |
| 6.4-Pixhawk | 景略 | |
| 6.5-Pixracer | 景略 | |
| 6.6-树莓派Pi 2 | 誓言 | |
| 6.7-骁龙 | 誓言 | |
| 6.7.1-相机和光流 | Fantasy | |
| 6.7.2-高级骁龙 | ||
| 6.7.2.1-获取I/O数据 | ||
| 7-中间件及架构 | - _ - | Middleware and Architecture |
| 7.1-uORB | 彩虹小羊 | |
| 7.2-自定义MAVlink消息 | 彩虹小羊 | |
| 7.3-守护进程 | 彩虹小羊 | |
| 7.4-驱动框架 | 彩虹小羊 | |
| 8-机型 | - _ - | Airframes |
| 8.1-统一的基础代码 | Innoecho | |
| 8.2-添加一个新的机型 | Innoecho | |
| 8.3-多旋翼 | Innoecho | |
| 8.3.1-电机映射 | Innoecho | |
| 8.3.2-QAV 250 Racer | Innoecho | |
| 8.3.3-Matrice 100 | Innoecho | |
| 8.3.4-QAV-R | Fantasy | |
| 8.4-直升机 | Innoecho | |
| 8.4.1-Wing Wing Z-84 | Innoecho | |
| 8.5-垂直起降飞行器 | Innoecho | |
| 8.5.1-垂直起降测试 | Innoecho | |
| 8.5.2-TBS Caipiroshka | Innoecho | |
| 8.6-船舶,潜水艇,飞艇,racer | Innoecho | |
| 9-Companion Computer | - _ - | Companion Computers |
| 9.1-Pixhawk family | Innoecho | |
| 10-使用DroneKit的机器人 | Innoecho | Robotics using DroneKit |
| 10.1-DroneKit的使用 | Innoecho | |
| 11-使用ROS的机器人 | - _ - | Robotics using ROS |
| 11.1-用Linux进行外部控制 | Innoecho | |
| 11.2-在树莓派Pi2上安装ROS | Innoecho | |
| 11.3-MAVROS | Innoecho | |
| 11.4-MAVROS外部控制例程 | Innoecho | |
| 11.5-外部位置估计 | Innoecho | |
| 11.6-Gazebo Octomap | Innoecho | |
| 12-传感器和执行机构总线 | - _ - | Sensor and Actuator Buses |
| 12.1-I2C BUS | - _ - | |
| 12.1.1-SF1XX Lidar | arctory | |
| 12.2-UAVCAN | 川 | |
| 12.2.1-UAVCAN Bootloader | silence | |
| 12.2.2-UAVCAN 固件升级 | silence | |
| 12.2.3-UAVCAN 配置 | 川 | |
| 12.2.4-UAVCAN的各种笔记 | 川 | |
| 12.3-PWM / GPIO | -_- | |
| 12.4-UART | - _ - | |
| 12.4.1-uLanding Radar | 川 | |
| 13-调试以及高级主题 | - _ - | Debugging and Advanced Topics |
| 13.1-FAQ | 如果你永无畏惧 | |
| 13.2-系统控制台 | why | |
| 13.3-系统启动 | why | |
| 13.4-参数 & 配置 | Maoquan | |
| 13.5-自驾仪调试 | ||
| 13.6-仿真调试 | ||
| 13.7-发送调试的值 | yidengfeiwu | |
| 13.8-Profiling | yidengfeiwu | |
| 13.9-室内 / 假 GPS | ||
| 13.10-相机触发器 | 含笑~饮砒霜 | |
| 13.11-Logging | ||
| 13.12-飞行日志分析 | Fantasy | |
| 13.13-EKF2的Log文件回放 | ||
| 13.14-System-wide Replay | ||
| 13.15-安装RealSense R200的驱动 | ||
| 13.16-Parrot Bebop | ||
| 13.17-设置云台控制 | 含笑~饮砒霜 | |
| 13.18-切换状态估计器 | ||
| 13.19-Out of tree Modules | ||
| 13.20-ULog文件模式 | ||
| 13.21-Licenses | ||
| 14-软件更新 | - _ - | Software Update |
| 14.1-STM32 BootLoader | Fantasy | |
| 15-测试和持续集成 | StDeY | Testing and CI |
| 15.1-Docker 容器 | ||
| 15.2-持续集成 | ||
| 15.2.1-Jenkins持续集成环境 |
