- translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e
- PX4 System Console(系统控制台)
- System Console vs. Shell
- Snapdragon Flight : Console接线
- Pixracer / Pixhawk v3: Console接线
- Pixhawk v1: Console连线
- 通过Dronecode Probe连接
- 通过FTDI 3.3V 线连接
- 打开Console
- Linux / Mac OS: Screen
- Windows: PuTTY
- Console入门
- MAVLink Shell
- Snapdragon DSP Console
translated_page: https://github.com/PX4/Devguide/blob/master/en/debug/system_console.md
translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e
PX4 System Console(系统控制台)
System Console(系统控制台)允许访问系统底层,调试输出和分析系统启动流程。访问System Console最快捷的方式是使用 Dronecode probe, 但是常见的FTDI连线也是可以的。
System Console vs. Shell
有好多种shell,但只有一个Console:系统控制台,它是打印所有引导输出(和引导中自动启动的应用程序)的位置。(可以理解为系统控制台是多个shell中唯一一个打印所有引导输出的shell)
The system console is the location where all boot output (and applications auto-started on boot) is printed.
- System console(第一shell):硬件串口
- 其他shell : 连接至USB的Pixhawk(如Mac OS下显示为 /dev/tty.usbmodem1)
info
USB shell: 如果只是运行几个简单的命令或测试应用程序,连接到USB shell就足够了。
MAVLink shell可以这么使用,参照下文。
只有在调试启动流程或USB接口已被用于MAVlink连接地面站GCS的时候,才需要使用硬件串口console。
Snapdragon Flight : Console接线
Snapdragon Flight(骁龙开发平台)开发人员套件里面包含了一个3引脚的接线板,它可以用于访问console。 将附带的FTDI线连接到接头,并将接线板连接到扩展连接器。
Pixracer / Pixhawk v3: Console接线
将6P JST SH 1:1线连接到Dronecode Probe,或者将连接线的每个引脚按照如下所示连接到FTDI线上:
| Pixracer / Pixhawk v3 | FTDI | ||
|---|---|---|---|
| 1 | +5V (红) | N/C | |
| 2 | UART7 Tx | 5 | FTDI RX (黄) |
| 3 | UART7 Rx | 4 | FTDI TX (橙) |
| 4 | SWDIO | N/C | |
| 5 | SWCLK | N/C | |
| 6 | GND | 1 | FTDI GND (黑) |
Pixhawk v1: Console连线
系统console可以通过Dronecode Probe或FTDI线访问。两种方式将在下面介绍。
通过Dronecode Probe连接
将 Dronecode probe 的6P DF13 1:1线连接到Pixhawk的SERIAL4/5接口。

通过FTDI 3.3V 线连接
如果手头没有Dronecode Probe,也可以使用FTDI 3.3V (Digi-Key: 768-1015-ND) 。
| Pixhawk 1/2 | FTDI | ||
|---|---|---|---|
| 1 | +5V (红) | N/C | |
| 2 | S4 Tx | N/C | |
| 3 | S4 Rx | N/C | |
| 4 | S5 Tx | 5 | FTDI RX (黄) |
| 5 | S5 Rx | 4 | FTDI TX (橙) |
| 6 | GND | 1 | FTDI GND (黑) |
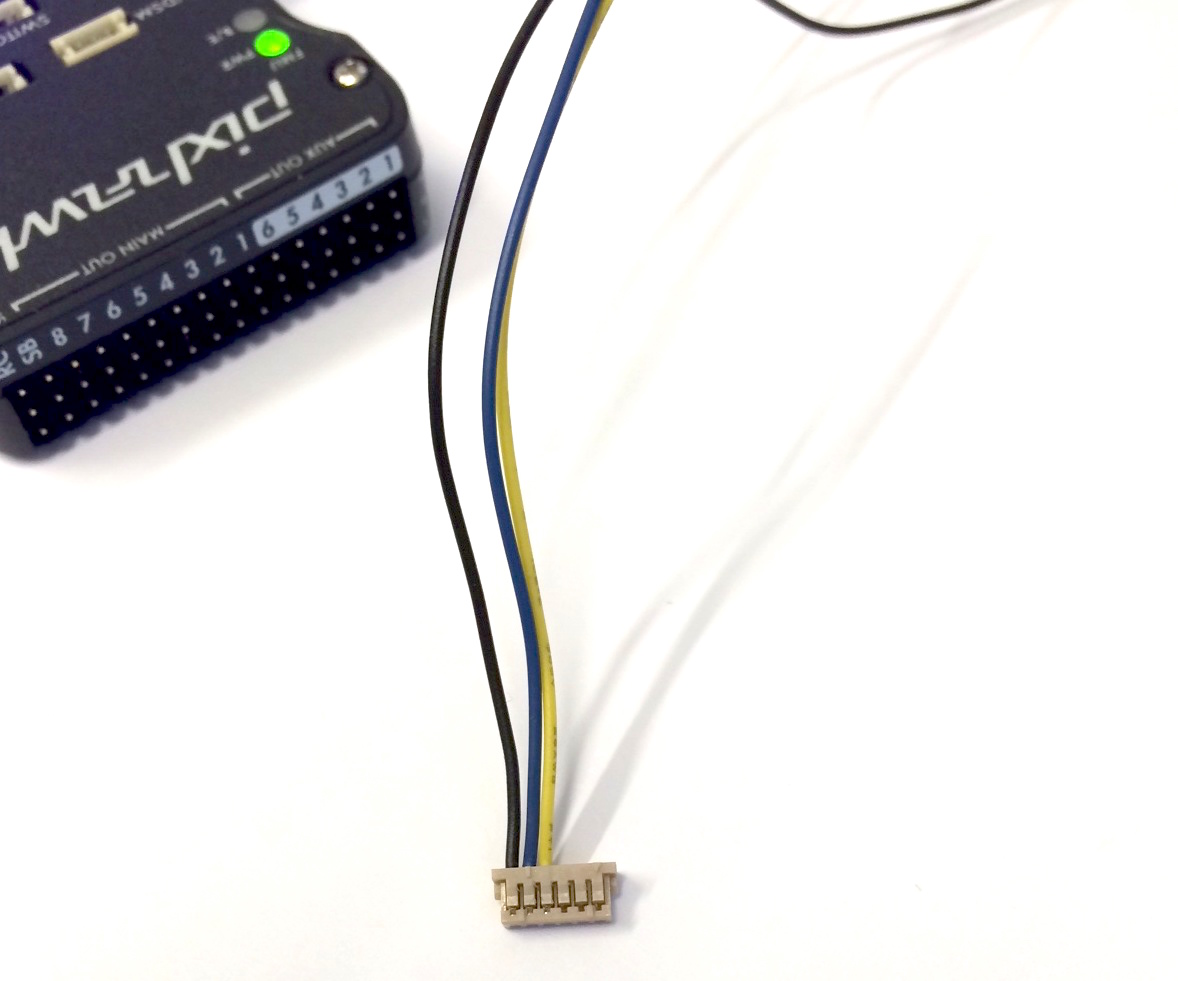
连接器引脚接线如下图所示。
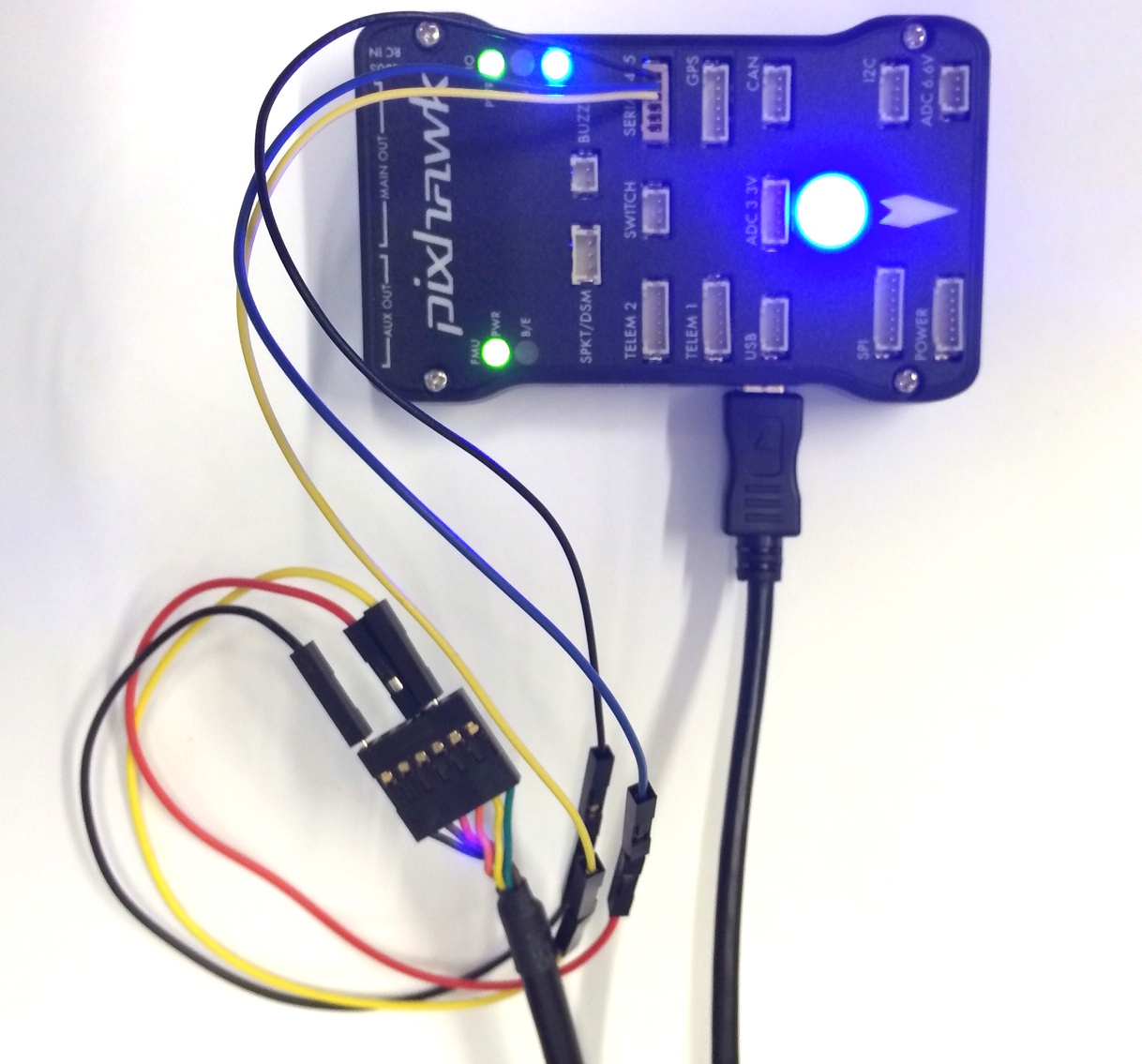
完整的接线如下图所示。
打开Console
Console接线完成后, 使用你选择的默认串口工具或者下面描述的默认工具:
Linux / Mac OS: Screen
Ubuntu下安装screen (Mac OS 已经默认安装了):
sudo apt-get install screen
- 串口: Pixhawk v1 / Pixracer 使用 57600 波特率
- 串行: Snapdragon Flight 使用 115200 波特率
按照 BAUDRATE baud, 8 data bits, 1 stop bit 将screen连接至正确的串口(使用 ls /dev/tty*命令,观察在拔下/重插USB设备时什么发生了变化)。Linux下的常见名称是 /dev/ttyUSB0 和 /dev/ttyACM0 ,Mac OS下是/dev/tty.usbserial-ABCBD。
screen /dev/ttyXXX BAUDRATE 8N1
Windows: PuTTY
下载 PuTTY 并启动它。
选择“串口连接”,然后设置串口参数:
- 57600 baud
- 8 data bits
- 1 stop bit
Console入门
输入ls查看本地文件系统,输入free查看剩余可用RAM。当飞控板带电重启时,console也可以显示系统启动日志。
nsh> lsnsh> free
MAVLink Shell
对于基于NuttX的系统(Pixhawk,Pixracer,…),也可以通过mavlink访问nsh console。它通过串口连接或WiFi(UDP/TCP)来工作。确保没有运行QGC,然后使用如下命令启动shell./Tools/mavlink_shell.py /dev/ttyACM0(在固件源代码中)。使用-h获得所有可用参数的描述。也许你先要使用sudo pip install pymavlink pyserial安装依赖文件。
Snapdragon DSP Console
当通过USB连接到Snapdragon开发板,你可以访问PX4 shell操作posix相关资源 。与DSP侧(QuRT)的交互可以通过qshellposix应用程序及其QuRT companion。
将Snapdragon通过USB连接后,打开mini-dm就可以看到DSP的输出:
${HEXAGON_SDK_ROOT}/tools/debug/mini-dm/Linux_Debug/mini-dm
注意: 可选方法,尤其是在Mac上,你也可以使用 nano-dm。
在linaro侧运行主程序:
cd /home/linaro./px4 px4.config
你可以通过linaro shell使用DSP加载的所有的应用程序,通过以下语法:
pxh> qshell command [args ...]
例如,要查看可用QuRT应用程序:
pxh> qshell list_tasks
所执行命令的输出显示在minidm上。
