- 第十七课:旋转
- 旋转与朝向(orientation)
- 欧拉角
- 四元数
- 解读四元数
- 基本操作
- 怎样用C++创建四元数?
- 怎样用GLSL创建四元数?
- 怎样把四元数转换为矩阵?
- 那究竟该用哪一个呢?
- 其他资源
- 速查手册
- 怎样判断两个四元数是否相同?
- 怎样旋转一个点?
- 怎样对两个四元数插值?
- 怎样累积两个旋转?
- 怎样计算两向量之间的旋转?
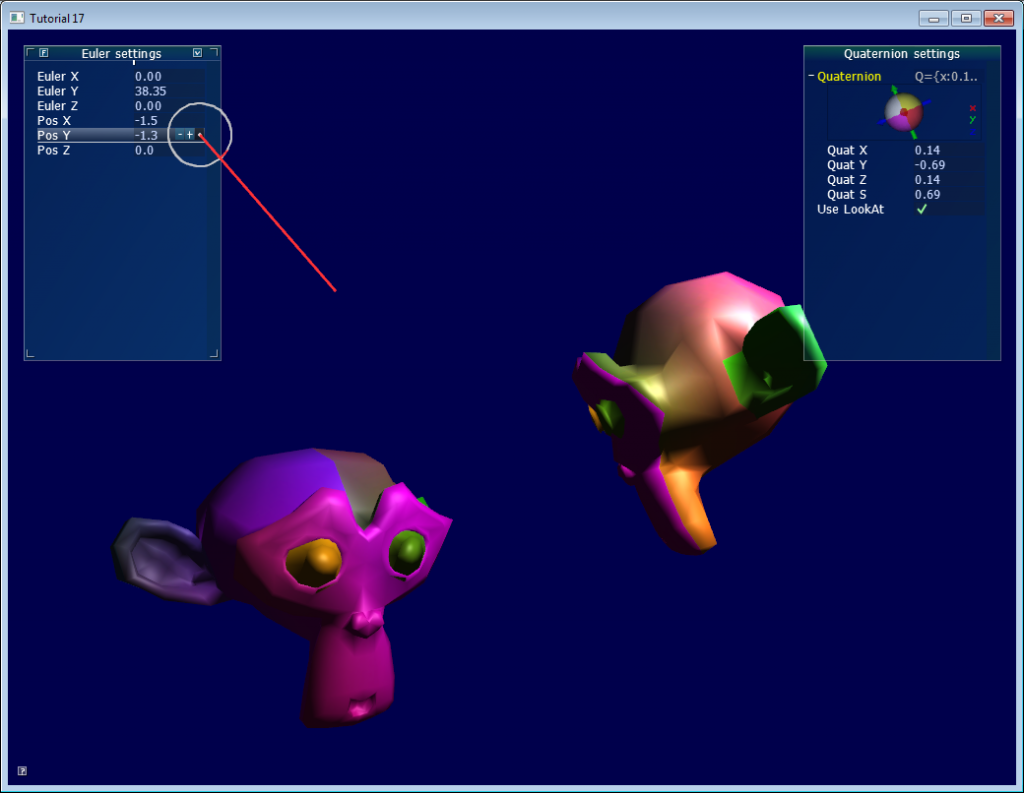
- 我需要一个类似gluLookAt的函数。怎样旋转物体使之朝向某点?
- 怎样使用LookAt且限制旋转速度?
- 怎样……
第十七课:旋转
虽然本课有些超出OpenGL的范围,但是解决了一个常见问题:怎样表示旋转?
《第三课:矩阵》中,我们了解到矩阵可以让点绕某个轴旋转。矩阵可以简洁地表示顶点的变换,但使用难度较大:例如,从最终结果中获取旋转轴就很麻烦。
本课将展示两种最常见的表示旋转的方法:欧拉角(Euler angles)和四元数(Quaternion)。最重要的是,本课将详细解释为何要尽量使用四元数。
旋转与朝向(orientation)
阅读有关旋转的文献时,你可能会为其中的术语感到困惑。本课中:
“朝向”是状态:该物体的朝向为……
“旋转”是操作:旋转该物体
也就是说,当实施旋转操作时,就改变了物体的朝向。 两者形式相同,因此容易混淆。闲话少叙,开始进入正题……
欧拉角
欧拉角是表示朝向的最简方法,只需存储绕X、Y、Z轴旋转的角度,非常容易理解。你可以用vec3来存储一个欧拉角:
vec3 EulerAngles( RotationAroundXInRadians, RotationAroundYInRadians, RotationAroundZInRadians);
这三个旋转是依次施加的,通常的顺序是:Y-Z-X(但并非一定要按照这种顺序)。顺序不同,产生的结果也不同。
一个欧拉角的简单应用就是用于设置角色的朝向。通常,游戏角色不会绕X和Z轴旋转,仅仅绕竖直的Y轴旋转。因此,无需处理三个朝向,只需用一个float型变量表示方向即可。
另外一个使用欧拉角的例子是FPS相机:用一个角度表示头部朝向(绕Y轴),一个角度表示俯仰(绕X轴)。参见common/controls.cpp的示例。
不过,面对更加复杂的情况时,欧拉角就显得力不从心了。例如:
- 对两个朝向进行插值比较困难。简单地对X、Y、Z角度进行插值得到的结果不太理想。
- 实施多次旋转很复杂且不精确:必须计算出最终的旋转矩阵,然后据此推测书欧拉角。
- “臭名昭著”的“万向节死锁”(Gimbal Lock)问题有时会让旋转“卡死”。其他一些奇异状态还会导致模型方向翻转。
- 不同的角度可产生同样的旋转(例如-180°和180°)
- 容易出错——如上所述,一般的旋转顺序是YZX,如果用了非YZX顺序的库,就有麻烦了。
- 某些操作很复杂:如绕指定的轴旋转N角度。
四元数是表示旋转的好工具,可解决上述问题。
四元数
四元数由4个数[x y z w]构成,表示了如下的旋转:
// RotationAngle is in radiansx = RotationAxis.x * sin(RotationAngle / 2)y = RotationAxis.y * sin(RotationAngle / 2)z = RotationAxis.z * sin(RotationAngle / 2)w = cos(RotationAngle / 2)
RotationAxis,顾名思义即旋转轴。RotationAngle是旋转的角度。
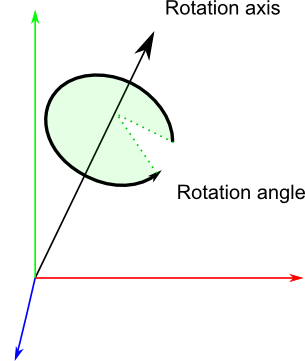
因此,四元数实际上存储了一个旋转轴和一个旋转角度。这让旋转的组合变简单了。
解读四元数
四元数的形式当然不如欧拉角直观,不过还是能看懂的:xyz分量大致代表了各个轴上的旋转分量,而w=acos(旋转角度/2)。举个例子,假设你在调试器中看到了这样的值[ 0.7 0 0 0.7 ]。x=0.7,比y、z的大,因此主要是在绕X轴旋转;而2*acos(0.7) = 1.59弧度,所以旋转角度应该是90°。
同理,[0 0 0 1] (w=1)表示旋转角度 = 2acos(1) = 0,因此这是一个单位四元数*(unit quaternion),表示没有旋转。
基本操作
不必理解四元数的数学原理:这种表示方式太晦涩了,因此我们一般通过一些工具函数进行计算。如果对这些数学原理感兴趣,可以参考实用工具和链接中的数学书籍。
怎样用C++创建四元数?
// Don't forget to #include <glm/gtc/quaternion.hpp> and <glm/gtx/quaternion.hpp>// Creates an identity quaternion (no rotation)quat MyQuaternion;// Direct specification of the 4 components// You almost never use this directlyMyQuaternion = quat(w,x,y,z);// Conversion from Euler angles (in radians) to Quaternionvec3 EulerAngles(90, 45, 0);MyQuaternion = quat(EulerAngles);// Conversion from axis-angle// In GLM the angle must be in degrees here, so convert it.MyQuaternion = gtx::quaternion::angleAxis(degrees(RotationAngle), RotationAxis);
怎样用GLSL创建四元数?
不要在shader中创建四元数。应该把四元数转换为旋转矩阵,用于模型矩阵中。顶点会一如既往地随着MVP矩阵的变化而旋转。
某些情况下,你可能确实需要在shader中使用四元数。例如,GPU骨骼动画。GLSL中没有四元数类型,但是可以将四元数存在vec4变量中,然后在shader中计算。
怎样把四元数转换为矩阵?
mat4 RotationMatrix = quaternion::toMat4(quaternion);
这下可以像往常一样建立模型矩阵了:
mat4 RotationMatrix = quaternion::toMat4(quaternion);...mat4 ModelMatrix = TranslationMatrix * RotationMatrix * ScaleMatrix;// You can now use ModelMatrix to build the MVP matrix
那究竟该用哪一个呢?
在欧拉角和四元数之间作选择还真不容易。欧拉角对于美工来说显得很直观,因此如果要做一款3D编辑器,请选用欧拉角。但对程序员来说,四元数却是最方便的。所以在写3D引擎内核时应该选用四元数。
一个普遍的共识是:在程序内部使用四元数,在需要和用户交互的地方就用欧拉角。
这样,在处理各种问题时,你才能得心应手(至少会轻松一点)。如果确有必要(如上文所述的FPS相机,设置角色朝向等情况),不妨就用欧拉角,附加一些转换工作。
其他资源
- 实用工具和链接中的书籍
老是老了点,《游戏编程精粹1》(Game Programming Gems I)有几篇关于四元数的好文章。也许网络上就有这份资料。
一个关于旋转的[GDC报告]http://www.essentialmath.com/GDC2012/GDC2012_JMV_Rotations.pdf
- The Game Programing Wiki Quaternion tutorial
- Ogre3D FAQ on quaternions。 第二部分大多是针对OGRE的。
- Ogre3D Vector3D.h和Quaternion.cpp
速查手册
怎样判断两个四元数是否相同?
向量点积是两向量夹角的余弦值。若该值为1,那么这两个向量同向。判断两个四元数是否相同的方法与之十分相似:
float matching = quaternion::dot(q1, q2);if ( abs(matching-1.0) < 0.001 ){// q1 and q2 are similar}
由点积的acos值还可以得到q1和q2间的夹角。
怎样旋转一个点?
方法如下:
rotated_point = orientation_quaternion * point;
……但如果想计算模型矩阵,你得先将其转换为矩阵。注意,旋转的中心始终是原点。如果想绕别的点旋转:
rotated_point = origin + (orientation_quaternion * (point-origin));
怎样对两个四元数插值?
SLERP意为球面线性插值(Spherical Linear intERPolation)、可以用GLM中的mix函数进行SLERP:
glm::quat interpolatedquat = quaternion::mix(quat1, quat2, 0.5f); // or whatever factor
怎样累积两个旋转?
只需将两个四元数相乘即可。顺序和矩阵乘法一致。亦即逆序相乘:
quat combined_rotation = second_rotation * first_rotation;
怎样计算两向量之间的旋转?
(也就是说,四元数得把v1旋转到v2)
基本思路很简单:
- 两向量间的夹角很好找:由点积可知其cos值。
- 旋转轴很好找:两向量的叉乘积。
如下的算法就是依照上述思路实现的,此外还处理了一些特例:
quat RotationBetweenVectors(vec3 start, vec3 dest){start = normalize(start);dest = normalize(dest);float cosTheta = dot(start, dest);vec3 rotationAxis;if (cosTheta < -1 + 0.001f){// special case when vectors in opposite directions:// there is no "ideal" rotation axis// So guess one; any will do as long as it's perpendicular to startrotationAxis = cross(vec3(0.0f, 0.0f, 1.0f), start);if (gtx::norm::length2(rotationAxis) < 0.01 ) // bad luck, they were parallel, try again!rotationAxis = cross(vec3(1.0f, 0.0f, 0.0f), start);rotationAxis = normalize(rotationAxis);return gtx::quaternion::angleAxis(180.0f, rotationAxis);}rotationAxis = cross(start, dest);float s = sqrt( (1+cosTheta)*2 );float invs = 1 / s;return quat(s * 0.5f,rotationAxis.x * invs,rotationAxis.y * invs,rotationAxis.z * invs);}
(可在common/quaternion_utils.cpp中找到该函数)
我需要一个类似gluLookAt的函数。怎样旋转物体使之朝向某点?
调用RotationBetweenVectors函数!
// Find the rotation between the front of the object (that we assume towards +Z,// but this depends on your model) and the desired directionquat rot1 = RotationBetweenVectors(vec3(0.0f, 0.0f, 1.0f), direction);
现在,你也许想让物体保持竖直:
// Recompute desiredUp so that it's perpendicular to the direction// You can skip that part if you really want to force desiredUpvec3 right = cross(direction, desiredUp);desiredUp = cross(right, direction);// Because of the 1rst rotation, the up is probably completely screwed up.// Find the rotation between the "up" of the rotated object, and the desired upvec3 newUp = rot1 * vec3(0.0f, 1.0f, 0.0f);quat rot2 = RotationBetweenVectors(newUp, desiredUp);
组合到一起:
quat targetOrientation = rot2 * rot1; // remember, in reverse order.
注意,“direction”仅仅是方向,并非目标位置!你可以轻松计算出方向:targetPos – currentPos。
得到目标朝向后,你很可能想对startOrientation和targetOrientation进行插值
(可在common/quaternion_utils.cpp中找到此函数。)
怎样使用LookAt且限制旋转速度?
基本思想是采用SLERP(用glm::mix函数),但要控制插值的幅度,避免角度偏大。
float mixFactor = maxAllowedAngle / angleBetweenQuaternions;quat result = glm::gtc::quaternion::mix(q1, q2, mixFactor);
如下是更为复杂的实现。该实现处理了许多特例。注意,出于优化的目的,代码中并未使用mix函数。
quat RotateTowards(quat q1, quat q2, float maxAngle){if( maxAngle < 0.001f ){// No rotation allowed. Prevent dividing by 0 later.return q1;}float cosTheta = dot(q1, q2);// q1 and q2 are already equal.// Force q2 just to be sureif(cosTheta > 0.9999f){return q2;}// Avoid taking the long path around the sphereif (cosTheta < 0){q1 = q1*-1.0f;cosTheta *= -1.0f;}float angle = acos(cosTheta);// If there is only a 2° difference, and we are allowed 5°,// then we arrived.if (angle < maxAngle){return q2;}float fT = maxAngle / angle;angle = maxAngle;quat res = (sin((1.0f - fT) * angle) * q1 + sin(fT * angle) * q2) / sin(angle);res = normalize(res);return res;}
可以这样用RotateTowards函数:
CurrentOrientation = RotateTowards(CurrentOrientation, TargetOrientation, 3.14f * deltaTime );
(可在common/quaternion_utils.cpp中找到此函数)
